PCL下载指南:轻松获取并安装PCL库

点云库(Point Cloud Library,简称PCL)是一个开源的、跨平台的点云处理库,广泛应用于机器人、计算机视觉、三维重建等领域。本文将为您详细介绍如何下载并安装PCL库,帮助您快速开始使用PCL进行点云处理。
一、了解PCL

PCL是一个强大的点云处理库,它提供了丰富的算法和工具,用于点云的滤波、分割、特征提取、表面重建等操作。PCL支持多种数据格式,如PCD、PLY等,并且可以与多种编程语言和平台兼容,如C 、Python、ROS等。
二、下载PCL
要下载PCL库,您可以从以下途径获取:
访问PCL官方网站(http://pointclouds.org/)
在GitHub上搜索PCL库(https://github.com/PointCloudLibrary/pcl)
PCL-1.9.1-AllInOne-msvc2017-win64.exe:适用于Windows系统,使用MSVC2017编译
pcl-1.9.1-pdb-msvc2017-win64.zip:适用于Windows系统,包含调试信息
PCL源代码:适用于所有平台,需要自行编译
三、安装PCL

以下是安装PCL库的步骤:
下载适合您的PCL版本,并解压到本地目录
以管理员权限运行安装程序
接受许可协议
选择安装路径,注意不要包含中文和空格
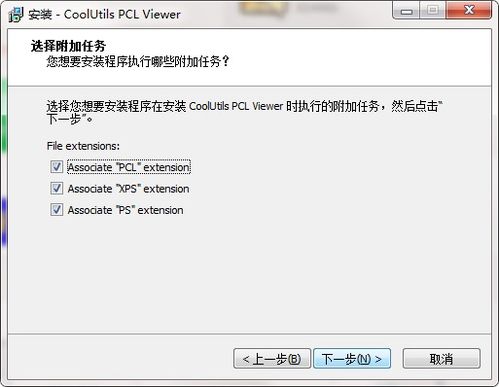
勾选所有组件,然后点击“安装”
安装过程中,可能会弹出OpenNI的安装界面,选择对应的安装路径
安装完成后,解压下载的pdb文件,并将内容复制到安装目录下的bin文件夹
安装完成后,您可以在安装目录下找到以下内容:
bin:包含可执行文件和库文件
include:包含头文件
lib:包含库文件
share:包含示例数据和文档
四、配置环境变量
为了在项目中使用PCL库,您需要配置环境变量。以下是配置步骤:
打开系统属性,选择“高级系统设置”
在“系统属性”窗口中,点击“环境变量”
在“系统变量”中,添加一个名为PCLROOT的新变量,并将其值设置为PCL的安装目录
在“系统变量”中,找到Path变量,并在其值后追加PCL的bin目录路径
配置完成后,您可以在命令行中输入以下命令来验证PCL是否已正确安装:
pcl-config --version
通过以上步骤,您已经成功下载并安装了PCL库。现在,您可以开始使用PCL进行点云处理了。PCL提供了丰富的功能和算法,相信在您的项目中会发挥重要作用。